

Unitree Go2
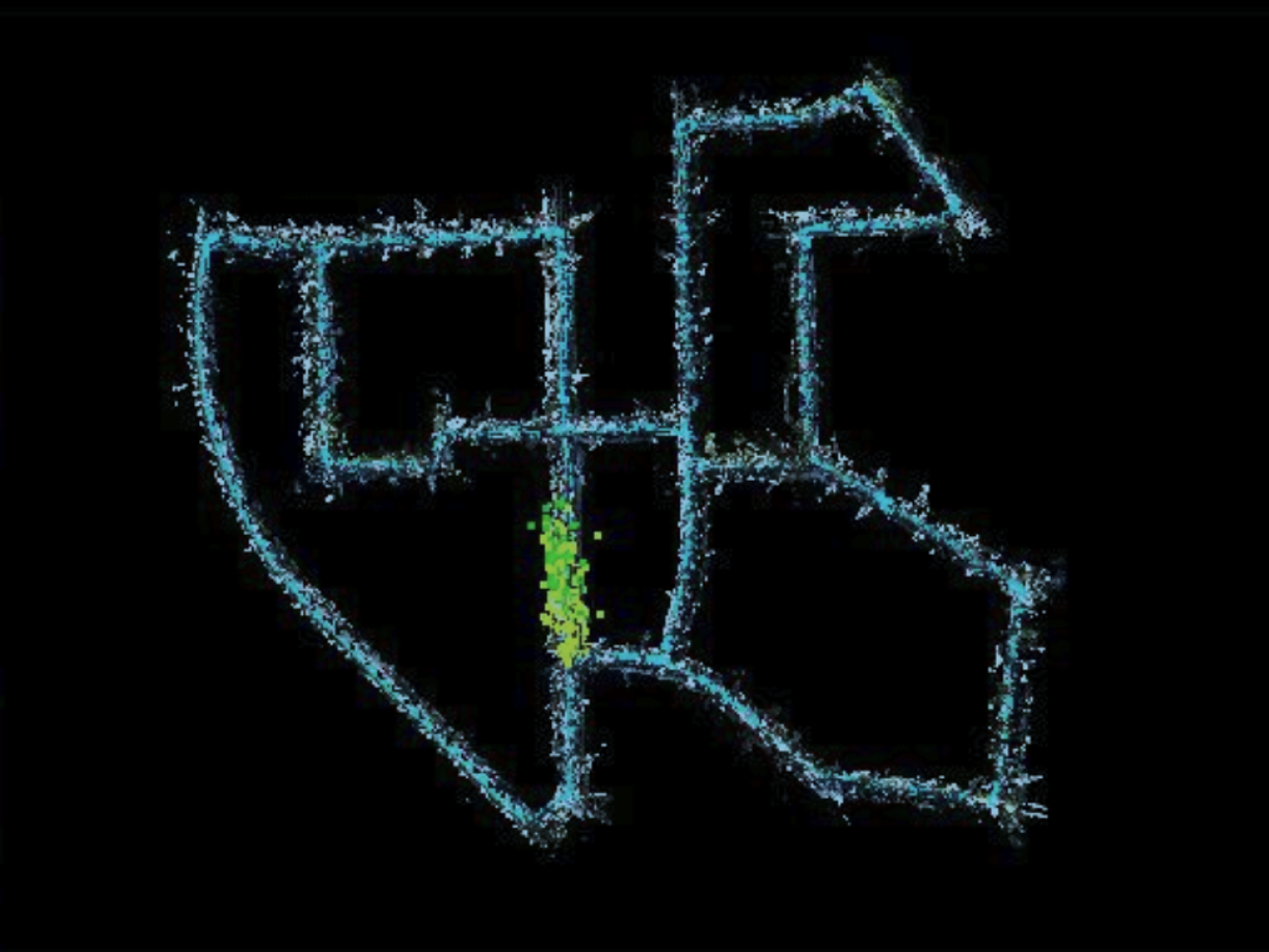
Developing navigation and mapping systems for a Unitree Go2 quadruped to operate effectively in constricted spaces
Passionate about robotics, I bring diverse experience across AMRs, cobots, quadrupeds, and advanced robotic systems. With a strong foundation in autonomy, perception, SLAM and Deep learning, I specialize in designing intelligent solutions that improve efficiency and expand real-world applications of robotics.
Technologies and tools I have mastered over the years










Linux


Eigen



Developing navigation and mapping systems for a Unitree Go2 quadruped to operate effectively in constricted spaces
Development of a Siamese Neural Network for one shot learning

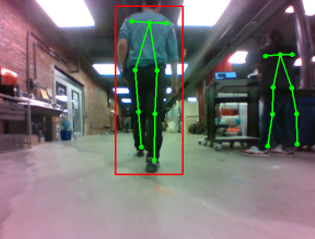
Methods capable of accurately identifying and classifying various terrains, obstacles, and objects for improved autonomous vehicle navigation

Estimating the trajectory of a vehicle using data from an IMU. Uses techniques like IMU calibration, complementary filters, and sensor fusion
Comparing SLAM algorithms - RTAB-Map, OpenVSLAM, Cartographer and SPTAM
Check out some robots and mechanisms that I designed and prototyped.

Master of Science in Robotics
Northeastern University, Boston, MA
September 2022 - Dec 2024
GPA: 3.95/4.0
Relevant Courses:

Bachelor of Technology in Mechanical Engineering
K. J. Somaiya College of Engineering, Mumbai, India
Aug 2017 - May 2021
GPA: 8.84/10.00
Role: Robotics Intern
Dates: July 2023 - April 2024
Responsibilities:

Role: Robotics Engineer
Dates: August 2021 - July 2022
Responsibilities:
Download my full resume here.
I'm always open to discussing opportunities, projects, and collaborations in Robotics. Feel free to reach out if you'd like to work together or learn more about my work.